 |
Jolt Physics
A multi core friendly Game Physics Engine
|
|
Jolt Physics
A multi core friendly Game Physics Engine
|
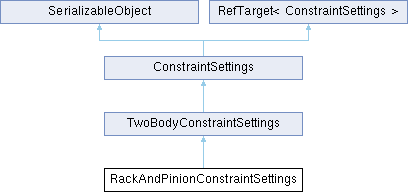
Rack and pinion constraint (slider & gear) settings. More...
#include <RackAndPinionConstraint.h>
Public Member Functions | |
| virtual void | SaveBinaryState (StreamOut &inStream) const override |
| Saves the contents of the constraint settings in binary form to inStream. More... | |
| virtual TwoBodyConstraint * | Create (Body &inBody1, Body &inBody2) const override |
| void | SetRatio (int inNumTeethRack, float inRackLength, int inNumTeethPinion) |
| virtual TwoBodyConstraint * | Create (Body &inBody1, Body &inBody2) const =0 |
| virtual void | SaveBinaryState (StreamOut &inStream) const |
| Saves the contents of the constraint settings in binary form to inStream. More... | |
 Public Member Functions inherited from SerializableObject Public Member Functions inherited from SerializableObject | |
| virtual | ~SerializableObject ()=default |
| Constructor. More... | |
| Public Member Functions inherited from RefTarget< ConstraintSettings > | |
| RefTarget ()=default | |
| Constructor. More... | |
| RefTarget (const RefTarget &) | |
| ~RefTarget () | |
| assert no one is referencing us More... | |
| void | SetEmbedded () const |
| RefTarget & | operator= (const RefTarget &) |
| Assignment operator. More... | |
| uint32 | GetRefCount () const |
| Get current refcount of this object. More... | |
| void | AddRef () const |
| Add or release a reference to this object. More... | |
| void | Release () const |
Public Attributes | |
| EConstraintSpace | mSpace = EConstraintSpace::WorldSpace |
| This determines in which space the constraint is setup, all properties below should be in the specified space. More... | |
| Vec3 | mHingeAxis = Vec3::sAxisX() |
| Body 1 (pinion) constraint reference frame (space determined by mSpace). More... | |
| Vec3 | mSliderAxis = Vec3::sAxisX() |
| Body 2 (rack) constraint reference frame (space determined by mSpace) More... | |
| float | mRatio = 1.0f |
| Ratio between the rack and pinion, see SetRatio. More... | |
| Public Attributes inherited from ConstraintSettings | |
| bool | mEnabled = true |
| If this constraint is enabled initially. Use Constraint::SetEnabled to toggle after creation. More... | |
| int | mNumVelocityStepsOverride = 0 |
| Override for the number of solver velocity iterations to run, the total amount of iterations is the max of PhysicsSettings::mNumVelocitySteps and this for all constraints in the island. More... | |
| int | mNumPositionStepsOverride = 0 |
| Override for the number of position velocity iterations to run, the total amount of iterations is the max of PhysicsSettings::mNumPositionSteps and this for all constraints in the island. More... | |
| float | mDrawConstraintSize = 1.0f |
| Size of constraint when drawing it through the debug renderer. More... | |
| uint64 | mUserData = 0 |
| User data value (can be used by application) More... | |
Protected Member Functions | |
| virtual void | RestoreBinaryState (StreamIn &inStream) override |
| This function should not be called directly, it is used by sRestoreFromBinaryState. More... | |
| virtual void | RestoreBinaryState (StreamIn &inStream) |
| This function should not be called directly, it is used by sRestoreFromBinaryState. More... | |
Additional Inherited Members | |
| Public Types inherited from ConstraintSettings | |
| using | ConstraintResult = Result< Ref< ConstraintSettings > > |
| Static Public Member Functions inherited from ConstraintSettings | |
| static ConstraintResult | sRestoreFromBinaryState (StreamIn &inStream) |
| Creates a constraint of the correct type and restores its contents from the binary stream inStream. More... | |
| Static Public Member Functions inherited from RefTarget< ConstraintSettings > | |
| static int | sInternalGetRefCountOffset () |
| INTERNAL HELPER FUNCTION USED BY SERIALIZATION. More... | |
| Protected Attributes inherited from RefTarget< ConstraintSettings > | |
| atomic< uint32 > | mRefCount |
| Current reference count. More... | |
| Static Protected Attributes inherited from RefTarget< ConstraintSettings > | |
| static constexpr uint32 | cEmbedded |
| A large value that gets added to the refcount to mark the object as embedded. More... | |
Rack and pinion constraint (slider & gear) settings.
|
overridevirtual |
Create an an instance of this constraint. Body1 should be the pinion (gear) and body 2 the rack (slider).
Implements TwoBodyConstraintSettings.
|
overrideprotectedvirtual |
This function should not be called directly, it is used by sRestoreFromBinaryState.
Reimplemented from ConstraintSettings.
|
overridevirtual |
Saves the contents of the constraint settings in binary form to inStream.
Reimplemented from ConstraintSettings.
|
inline |
Defines the ratio between the rotation of the pinion and the translation of the rack. The ratio is defined as: PinionRotation(t) = ratio * RackTranslation(t)
| inNumTeethRack | Number of teeth that the rack has |
| inRackLength | Length of the rack |
| inNumTeethPinion | Number of teeth the pinion has |
| Vec3 RackAndPinionConstraintSettings::mHingeAxis = Vec3::sAxisX() |
Body 1 (pinion) constraint reference frame (space determined by mSpace).
| float RackAndPinionConstraintSettings::mRatio = 1.0f |
Ratio between the rack and pinion, see SetRatio.
| Vec3 RackAndPinionConstraintSettings::mSliderAxis = Vec3::sAxisX() |
Body 2 (rack) constraint reference frame (space determined by mSpace)
| EConstraintSpace RackAndPinionConstraintSettings::mSpace = EConstraintSpace::WorldSpace |
This determines in which space the constraint is setup, all properties below should be in the specified space.