 |
Jolt Physics
A multi core friendly Game Physics Engine
|
|
Jolt Physics
A multi core friendly Game Physics Engine
|
#include <WheeledVehicleController.h>
Public Member Functions | |
| virtual VehicleController * | ConstructController (VehicleConstraint &inConstraint) const override |
| Create an instance of the vehicle controller class. | |
| virtual void | SaveBinaryState (StreamOut &inStream) const override |
| Saves the contents of the controller settings in binary form to inStream. | |
| virtual void | RestoreBinaryState (StreamIn &inStream) override |
| Restore the contents of the controller settings in binary form from inStream. | |
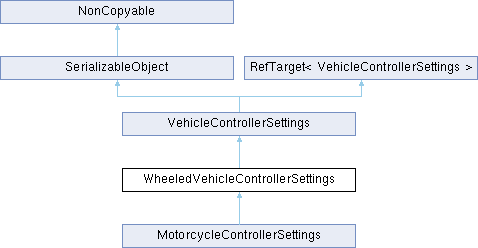
 Public Member Functions inherited from VehicleControllerSettings Public Member Functions inherited from VehicleControllerSettings | |
| Public Member Functions inherited from SerializableObject | |
| virtual | ~SerializableObject ()=default |
| Destructor. | |
| Public Member Functions inherited from RefTarget< VehicleControllerSettings > | |
| RefTarget ()=default | |
| Constructor. | |
| RefTarget (const RefTarget &) | |
| ~RefTarget () | |
| assert no one is referencing us | |
| void | SetEmbedded () const |
| RefTarget & | operator= (const RefTarget &) |
| Assignment operator. | |
| uint32 | GetRefCount () const |
| Get current refcount of this object. | |
| void | AddRef () const |
| Add or release a reference to this object. | |
| void | Release () const |
Public Attributes | |
| VehicleEngineSettings | mEngine |
| The properties of the engine. | |
| VehicleTransmissionSettings | mTransmission |
| The properties of the transmission (aka gear box) | |
| Array< VehicleDifferentialSettings > | mDifferentials |
| List of differentials and their properties. | |
| float | mDifferentialLimitedSlipRatio = 1.4f |
| Ratio max / min average wheel speed of each differential (measured at the clutch). When the ratio is exceeded all torque gets distributed to the differential with the minimal average velocity. This allows implementing a limited slip differential between differentials. Set to FLT_MAX for an open differential. Value should be > 1. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from RefTarget< VehicleControllerSettings > | |
| static int | sInternalGetRefCountOffset () |
| INTERNAL HELPER FUNCTION USED BY SERIALIZATION. | |
| Protected Member Functions inherited from SerializableObject | |
| SerializableObject ()=default | |
| Don't allow (copy) constructing this base class, but allow derived classes to (copy) construct themselves. | |
| SerializableObject (const SerializableObject &)=default | |
| SerializableObject & | operator= (const SerializableObject &)=default |
| Protected Attributes inherited from RefTarget< VehicleControllerSettings > | |
| atomic< uint32 > | mRefCount |
| Current reference count. | |
| Static Protected Attributes inherited from RefTarget< VehicleControllerSettings > | |
| static constexpr uint32 | cEmbedded |
| A large value that gets added to the refcount to mark the object as embedded. | |
Settings of a vehicle with regular wheels
The properties in this controller are largely based on "Car Physics for Games" by Marco Monster. See: https://www.asawicki.info/Mirror/Car%20Physics%20for%20Games/Car%20Physics%20for%20Games.html
|
overridevirtual |
Create an instance of the vehicle controller class.
Implements VehicleControllerSettings.
Reimplemented in MotorcycleControllerSettings.
|
overridevirtual |
Restore the contents of the controller settings in binary form from inStream.
Implements VehicleControllerSettings.
Reimplemented in MotorcycleControllerSettings.
|
overridevirtual |
Saves the contents of the controller settings in binary form to inStream.
Implements VehicleControllerSettings.
Reimplemented in MotorcycleControllerSettings.
| float WheeledVehicleControllerSettings::mDifferentialLimitedSlipRatio = 1.4f |
Ratio max / min average wheel speed of each differential (measured at the clutch). When the ratio is exceeded all torque gets distributed to the differential with the minimal average velocity. This allows implementing a limited slip differential between differentials. Set to FLT_MAX for an open differential. Value should be > 1.
| Array<VehicleDifferentialSettings> WheeledVehicleControllerSettings::mDifferentials |
List of differentials and their properties.
| VehicleEngineSettings WheeledVehicleControllerSettings::mEngine |
The properties of the engine.
| VehicleTransmissionSettings WheeledVehicleControllerSettings::mTransmission |
The properties of the transmission (aka gear box)