 |
Jolt Physics
A multi core friendly Game Physics Engine
|
|
Jolt Physics
A multi core friendly Game Physics Engine
|
Fixed constraint settings, used to create a fixed constraint. More...
#include <FixedConstraint.h>
Public Member Functions | |
| virtual void | SaveBinaryState (StreamOut &inStream) const override |
| Saves the contents of the constraint settings in binary form to inStream. | |
| virtual TwoBodyConstraint * | Create (Body &inBody1, Body &inBody2) const override |
| Create an instance of this constraint. | |
 Public Member Functions inherited from TwoBodyConstraintSettings Public Member Functions inherited from TwoBodyConstraintSettings | |
| Public Member Functions inherited from ConstraintSettings | |
| Public Member Functions inherited from SerializableObject | |
| virtual | ~SerializableObject ()=default |
| Destructor. | |
| Public Member Functions inherited from RefTarget< ConstraintSettings > | |
| RefTarget ()=default | |
| Constructor. | |
| RefTarget (const RefTarget &) | |
| ~RefTarget () | |
| assert no one is referencing us | |
| void | SetEmbedded () const |
| RefTarget & | operator= (const RefTarget &) |
| Assignment operator. | |
| uint32 | GetRefCount () const |
| Get current refcount of this object. | |
| void | AddRef () const |
| Add or release a reference to this object. | |
| void | Release () const |
Public Attributes | |
| EConstraintSpace | mSpace = EConstraintSpace::WorldSpace |
| This determines in which space the constraint is setup, all properties below should be in the specified space. | |
| bool | mAutoDetectPoint = false |
| When mSpace is WorldSpace mPoint1 and mPoint2 can be automatically calculated based on the positions of the bodies when the constraint is created (they will be fixated in their current relative position/orientation). Set this to false if you want to supply the attachment points yourself. | |
| RVec3 | mPoint1 = RVec3::sZero() |
| Body 1 constraint reference frame (space determined by mSpace) | |
| Vec3 | mAxisX1 = Vec3::sAxisX() |
| Vec3 | mAxisY1 = Vec3::sAxisY() |
| RVec3 | mPoint2 = RVec3::sZero() |
| Body 2 constraint reference frame (space determined by mSpace) | |
| Vec3 | mAxisX2 = Vec3::sAxisX() |
| Vec3 | mAxisY2 = Vec3::sAxisY() |
| Public Attributes inherited from ConstraintSettings | |
| bool | mEnabled = true |
| If this constraint is enabled initially. Use Constraint::SetEnabled to toggle after creation. | |
| uint32 | mConstraintPriority = 0 |
| uint | mNumVelocityStepsOverride = 0 |
| Used only when the constraint is active. Override for the number of solver velocity iterations to run, 0 means use the default in PhysicsSettings::mNumVelocitySteps. The number of iterations to use is the max of all contacts and constraints in the island. | |
| uint | mNumPositionStepsOverride = 0 |
| Used only when the constraint is active. Override for the number of solver position iterations to run, 0 means use the default in PhysicsSettings::mNumPositionSteps. The number of iterations to use is the max of all contacts and constraints in the island. | |
| float | mDrawConstraintSize = 1.0f |
| Size of constraint when drawing it through the debug renderer. | |
| uint64 | mUserData = 0 |
| User data value (can be used by application) | |
Protected Member Functions | |
| virtual void | RestoreBinaryState (StreamIn &inStream) override |
| This function should not be called directly, it is used by sRestoreFromBinaryState. | |
| Protected Member Functions inherited from ConstraintSettings | |
| ConstraintSettings ()=default | |
| Don't allow (copy) constructing this base class, but allow derived classes to (copy) construct themselves. | |
| ConstraintSettings (const ConstraintSettings &)=default | |
| ConstraintSettings & | operator= (const ConstraintSettings &)=default |
| Protected Member Functions inherited from SerializableObject | |
| SerializableObject ()=default | |
| Don't allow (copy) constructing this base class, but allow derived classes to (copy) construct themselves. | |
| SerializableObject (const SerializableObject &)=default | |
| SerializableObject & | operator= (const SerializableObject &)=default |
Additional Inherited Members | |
| Public Types inherited from ConstraintSettings | |
| using | ConstraintResult = Result<Ref<ConstraintSettings>> |
| Static Public Member Functions inherited from ConstraintSettings | |
| static ConstraintResult | sRestoreFromBinaryState (StreamIn &inStream) |
| Creates a constraint of the correct type and restores its contents from the binary stream inStream. | |
| Static Public Member Functions inherited from RefTarget< ConstraintSettings > | |
| static int | sInternalGetRefCountOffset () |
| INTERNAL HELPER FUNCTION USED BY SERIALIZATION. | |
| Protected Attributes inherited from RefTarget< ConstraintSettings > | |
| atomic< uint32 > | mRefCount |
| Current reference count. | |
| Static Protected Attributes inherited from RefTarget< ConstraintSettings > | |
| static constexpr uint32 | cEmbedded |
| A large value that gets added to the refcount to mark the object as embedded. | |
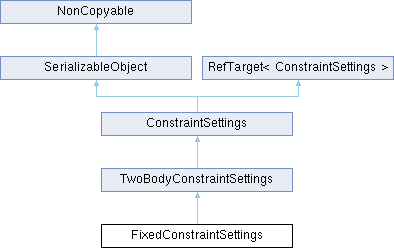
Fixed constraint settings, used to create a fixed constraint.
|
overridevirtual |
Create an instance of this constraint.
Implements TwoBodyConstraintSettings.
|
overrideprotectedvirtual |
This function should not be called directly, it is used by sRestoreFromBinaryState.
Reimplemented from ConstraintSettings.
|
overridevirtual |
Saves the contents of the constraint settings in binary form to inStream.
Reimplemented from ConstraintSettings.
| bool FixedConstraintSettings::mAutoDetectPoint = false |
When mSpace is WorldSpace mPoint1 and mPoint2 can be automatically calculated based on the positions of the bodies when the constraint is created (they will be fixated in their current relative position/orientation). Set this to false if you want to supply the attachment points yourself.
| Vec3 FixedConstraintSettings::mAxisX1 = Vec3::sAxisX() |
| Vec3 FixedConstraintSettings::mAxisX2 = Vec3::sAxisX() |
| Vec3 FixedConstraintSettings::mAxisY1 = Vec3::sAxisY() |
| Vec3 FixedConstraintSettings::mAxisY2 = Vec3::sAxisY() |
| RVec3 FixedConstraintSettings::mPoint1 = RVec3::sZero() |
Body 1 constraint reference frame (space determined by mSpace)
| RVec3 FixedConstraintSettings::mPoint2 = RVec3::sZero() |
Body 2 constraint reference frame (space determined by mSpace)
| EConstraintSpace FixedConstraintSettings::mSpace = EConstraintSpace::WorldSpace |
This determines in which space the constraint is setup, all properties below should be in the specified space.