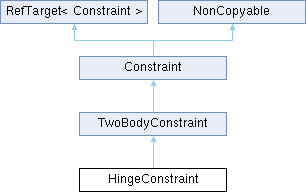
A hinge constraint constrains 2 bodies on a single point and allows only a single axis of rotation.
More...
|
| JPH_OVERRIDE_NEW_DELETE | HingeConstraint (Body &inBody1, Body &inBody2, const HingeConstraintSettings &inSettings) |
| | Construct hinge constraint. More...
|
| |
| virtual EConstraintSubType | GetSubType () const override |
| | Get the sub type of a constraint. More...
|
| |
| virtual void | NotifyShapeChanged (const BodyID &inBodyID, Vec3Arg inDeltaCOM) override |
| |
| virtual void | SetupVelocityConstraint (float inDeltaTime) override |
| |
| virtual void | ResetWarmStart () override |
| |
| virtual void | WarmStartVelocityConstraint (float inWarmStartImpulseRatio) override |
| |
| virtual bool | SolveVelocityConstraint (float inDeltaTime) override |
| |
| virtual bool | SolvePositionConstraint (float inDeltaTime, float inBaumgarte) override |
| |
| virtual void | DrawConstraint (DebugRenderer *inRenderer) const override |
| |
| virtual void | DrawConstraintLimits (DebugRenderer *inRenderer) const override |
| |
| virtual void | SaveState (StateRecorder &inStream) const override |
| | Saving state for replay. More...
|
| |
| virtual void | RestoreState (StateRecorder &inStream) override |
| | Restoring state for replay. More...
|
| |
| virtual Ref< ConstraintSettings > | GetConstraintSettings () const override |
| | Debug function to convert a constraint to its settings, note that this will not save to which bodies the constraint is connected to. More...
|
| |
| virtual Mat44 | GetConstraintToBody1Matrix () const override |
| | Calculates the transform that transforms from constraint space to body 1 space. The first column of the matrix is the primary constraint axis (e.g. the hinge axis / slider direction), second column the secondary etc. More...
|
| |
| virtual Mat44 | GetConstraintToBody2Matrix () const override |
| | Calculates the transform that transforms from constraint space to body 2 space. The first column of the matrix is the primary constraint axis (e.g. the hinge axis / slider direction), second column the secondary etc. More...
|
| |
| float | GetCurrentAngle () const |
| | Get the current rotation angle from the rest position. More...
|
| |
| void | SetMaxFrictionTorque (float inFrictionTorque) |
| |
| float | GetMaxFrictionTorque () const |
| |
| MotorSettings & | GetMotorSettings () |
| |
| const MotorSettings & | GetMotorSettings () const |
| |
| void | SetMotorState (EMotorState inState) |
| |
| EMotorState | GetMotorState () const |
| |
| void | SetTargetAngularVelocity (float inAngularVelocity) |
| | rad/s More...
|
| |
| float | GetTargetAngularVelocity () const |
| |
| void | SetTargetAngle (float inAngle) |
| | rad More...
|
| |
| float | GetTargetAngle () const |
| |
| void | SetLimits (float inLimitsMin, float inLimitsMax) |
| | Update the rotation limits of the hinge, value in radians (see HingeConstraintSettings) More...
|
| |
| float | GetLimitsMin () const |
| |
| float | GetLimitsMax () const |
| |
| bool | HasLimits () const |
| |
| const SpringSettings & | GetLimitsSpringSettings () const |
| | Update the limits spring settings. More...
|
| |
| SpringSettings & | GetLimitsSpringSettings () |
| |
| void | SetLimitsSpringSettings (const SpringSettings &inLimitsSpringSettings) |
| |
 Public Member Functions inherited from TwoBodyConstraint Public Member Functions inherited from TwoBodyConstraint |
| JPH_OVERRIDE_NEW_DELETE | TwoBodyConstraint (Body &inBody1, Body &inBody2, const TwoBodyConstraintSettings &inSettings) |
| | Constructor. More...
|
| |
| virtual EConstraintType | GetType () const override |
| | Get the type of a constraint. More...
|
| |
| virtual bool | IsActive () const override |
| | Solver interface. More...
|
| |
| virtual void | DrawConstraintReferenceFrame (DebugRenderer *inRenderer) const override |
| |
| Body * | GetBody1 () const |
| | Access to the connected bodies. More...
|
| |
| Body * | GetBody2 () const |
| |
| virtual Mat44 | GetConstraintToBody1Matrix () const =0 |
| | Calculates the transform that transforms from constraint space to body 1 space. The first column of the matrix is the primary constraint axis (e.g. the hinge axis / slider direction), second column the secondary etc. More...
|
| |
| virtual Mat44 | GetConstraintToBody2Matrix () const =0 |
| | Calculates the transform that transforms from constraint space to body 2 space. The first column of the matrix is the primary constraint axis (e.g. the hinge axis / slider direction), second column the secondary etc. More...
|
| |
| virtual void | BuildIslands (uint32 inConstraintIndex, IslandBuilder &ioBuilder, BodyManager &inBodyManager) override |
| | Link bodies that are connected by this constraint in the island builder. More...
|
| |
| virtual uint | BuildIslandSplits (LargeIslandSplitter &ioSplitter) const override |
| | Link bodies that are connected by this constraint in the same split. Returns the split index. More...
|
| |
| JPH_OVERRIDE_NEW_DELETE | Constraint (const ConstraintSettings &inSettings) |
| | Constructor. More...
|
| |
| virtual | ~Constraint ()=default |
| | Virtual destructor. More...
|
| |
| virtual EConstraintType | GetType () const |
| | Get the type of a constraint. More...
|
| |
| virtual EConstraintSubType | GetSubType () const =0 |
| | Get the sub type of a constraint. More...
|
| |
| uint32 | GetConstraintPriority () const |
| |
| void | SetConstraintPriority (uint32 inPriority) |
| |
| void | SetNumVelocityStepsOverride (uint inN) |
| | Used only when the constraint is active. Override for the number of solver velocity iterations to run, 0 means use the default in PhysicsSettings::mNumVelocitySteps. The number of iterations to use is the max of all contacts and constraints in the island. More...
|
| |
| uint | GetNumVelocityStepsOverride () const |
| |
| void | SetNumPositionStepsOverride (uint inN) |
| | Used only when the constraint is active. Override for the number of solver position iterations to run, 0 means use the default in PhysicsSettings::mNumPositionSteps. The number of iterations to use is the max of all contacts and constraints in the island. More...
|
| |
| uint | GetNumPositionStepsOverride () const |
| |
| void | SetEnabled (bool inEnabled) |
| |
| bool | GetEnabled () const |
| | Test if a constraint is enabled. More...
|
| |
| uint64 | GetUserData () const |
| | Access to the user data, can be used for anything by the application. More...
|
| |
| void | SetUserData (uint64 inUserData) |
| |
| virtual void | NotifyShapeChanged (const BodyID &inBodyID, Vec3Arg inDeltaCOM)=0 |
| |
| virtual void | ResetWarmStart ()=0 |
| |
| virtual void | BuildIslands (uint32 inConstraintIndex, IslandBuilder &ioBuilder, BodyManager &inBodyManager)=0 |
| | Link bodies that are connected by this constraint in the island builder. More...
|
| |
| virtual uint | BuildIslandSplits (LargeIslandSplitter &ioSplitter) const =0 |
| | Link bodies that are connected by this constraint in the same split. Returns the split index. More...
|
| |
| virtual void | DrawConstraint (DebugRenderer *inRenderer) const =0 |
| |
| virtual void | DrawConstraintLimits (DebugRenderer *inRenderer) const |
| |
| virtual void | DrawConstraintReferenceFrame (DebugRenderer *inRenderer) const |
| |
| float | GetDrawConstraintSize () const |
| | Size of constraint when drawing it through the debug renderer. More...
|
| |
| void | SetDrawConstraintSize (float inSize) |
| |
| virtual void | SaveState (StateRecorder &inStream) const |
| | Saving state for replay. More...
|
| |
| virtual void | RestoreState (StateRecorder &inStream) |
| | Restoring state for replay. More...
|
| |
| virtual Ref< ConstraintSettings > | GetConstraintSettings () const =0 |
| | Debug function to convert a constraint to its settings, note that this will not save to which bodies the constraint is connected to. More...
|
| |
| | RefTarget ()=default |
| | Constructor. More...
|
| |
| | RefTarget (const RefTarget &) |
| |
| | ~RefTarget () |
| | assert no one is referencing us More...
|
| |
| void | SetEmbedded () const |
| |
| RefTarget & | operator= (const RefTarget &) |
| | Assignment operator. More...
|
| |
| uint32 | GetRefCount () const |
| | Get current refcount of this object. More...
|
| |
| void | AddRef () const |
| | Add or release a reference to this object. More...
|
| |
| void | Release () const |
| |
| | NonCopyable ()=default |
| |
| | NonCopyable (const NonCopyable &)=delete |
| |
| void | operator= (const NonCopyable &)=delete |
| |
A hinge constraint constrains 2 bodies on a single point and allows only a single axis of rotation.