 |
Jolt Physics
A multi core friendly Game Physics Engine
|
|
Jolt Physics
A multi core friendly Game Physics Engine
|
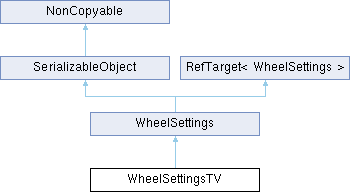
WheelSettings object specifically for TrackedVehicleController. More...
#include <TrackedVehicleController.h>
Public Member Functions | |
| virtual void | SaveBinaryState (StreamOut &inStream) const override |
| Saves the contents in binary form to inStream. More... | |
| virtual void | RestoreBinaryState (StreamIn &inStream) override |
| Restores the contents in binary form to inStream. More... | |
| virtual void | SaveBinaryState (StreamOut &inStream) const |
| Saves the contents in binary form to inStream. More... | |
| virtual void | RestoreBinaryState (StreamIn &inStream) |
| Restores the contents in binary form to inStream. More... | |
 Public Member Functions inherited from SerializableObject Public Member Functions inherited from SerializableObject | |
| virtual | ~SerializableObject ()=default |
| Constructor. More... | |
| Public Member Functions inherited from NonCopyable | |
| NonCopyable ()=default | |
| NonCopyable (const NonCopyable &)=delete | |
| void | operator= (const NonCopyable &)=delete |
| Public Member Functions inherited from RefTarget< WheelSettings > | |
| RefTarget ()=default | |
| Constructor. More... | |
| RefTarget (const RefTarget &) | |
| ~RefTarget () | |
| assert no one is referencing us More... | |
| void | SetEmbedded () const |
| RefTarget & | operator= (const RefTarget &) |
| Assignment operator. More... | |
| uint32 | GetRefCount () const |
| Get current refcount of this object. More... | |
| void | AddRef () const |
| Add or release a reference to this object. More... | |
| void | Release () const |
Public Attributes | |
| float | mLongitudinalFriction = 4.0f |
| Friction in forward direction of tire. More... | |
| float | mLateralFriction = 2.0f |
| Friction in sideway direction of tire. More... | |
| Public Attributes inherited from WheelSettings | |
| Vec3 | mPosition { 0, 0, 0 } |
| Attachment point of wheel suspension in local space of the body. More... | |
| Vec3 | mSuspensionForcePoint { 0, 0, 0 } |
| Where tire forces (suspension and traction) are applied, in local space of the body. A good default is the center of the wheel in its neutral pose. See mEnableSuspensionForcePoint. More... | |
| Vec3 | mSuspensionDirection { 0, -1, 0 } |
| Direction of the suspension in local space of the body, should point down. More... | |
| Vec3 | mSteeringAxis { 0, 1, 0 } |
| Direction of the steering axis in local space of the body, should point up (e.g. for a bike would be -mSuspensionDirection) More... | |
| Vec3 | mWheelUp { 0, 1, 0 } |
| Up direction when the wheel is in the neutral steering position (usually VehicleConstraintSettings::mUp but can be used to give the wheel camber or for a bike would be -mSuspensionDirection) More... | |
| Vec3 | mWheelForward { 0, 0, 1 } |
| Forward direction when the wheel is in the neutral steering position (usually VehicleConstraintSettings::mForward but can be used to give the wheel toe, does not need to be perpendicular to mWheelUp) More... | |
| float | mSuspensionMinLength = 0.3f |
| How long the suspension is in max raised position relative to the attachment point (m) More... | |
| float | mSuspensionMaxLength = 0.5f |
| How long the suspension is in max droop position relative to the attachment point (m) More... | |
| float | mSuspensionPreloadLength = 0.0f |
| The natural length (m) of the suspension spring is defined as mSuspensionMaxLength + mSuspensionPreloadLength. Can be used to preload the suspension as the spring is compressed by mSuspensionPreloadLength when the suspension is in max droop position. Note that this means when the vehicle touches the ground there is a discontinuity so it will also make the vehicle more bouncy as we're updating with discrete time steps. More... | |
| SpringSettings | mSuspensionSpring { ESpringMode::FrequencyAndDamping, 1.5f, 0.5f } |
| Settings for the suspension spring. More... | |
| float | mRadius = 0.3f |
| Radius of the wheel (m) More... | |
| float | mWidth = 0.1f |
| Width of the wheel (m) More... | |
| bool | mEnableSuspensionForcePoint = false |
| Enables mSuspensionForcePoint, if disabled, the forces are applied at the collision contact point. This leads to a more accurate simulation when interacting with dynamic objects but makes the vehicle less stable. When setting this to true, all forces will be applied to a fixed point on the vehicle body. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from RefTarget< WheelSettings > | |
| static int | sInternalGetRefCountOffset () |
| INTERNAL HELPER FUNCTION USED BY SERIALIZATION. More... | |
| Protected Attributes inherited from RefTarget< WheelSettings > | |
| atomic< uint32 > | mRefCount |
| Current reference count. More... | |
| Static Protected Attributes inherited from RefTarget< WheelSettings > | |
| static constexpr uint32 | cEmbedded |
| A large value that gets added to the refcount to mark the object as embedded. More... | |
WheelSettings object specifically for TrackedVehicleController.
|
overridevirtual |
Restores the contents in binary form to inStream.
Reimplemented from WheelSettings.
|
overridevirtual |
Saves the contents in binary form to inStream.
Reimplemented from WheelSettings.
| float WheelSettingsTV::mLateralFriction = 2.0f |
Friction in sideway direction of tire.
| float WheelSettingsTV::mLongitudinalFriction = 4.0f |
Friction in forward direction of tire.